
DARPA’s robotic cartographers created detailed cave maps
Two new videos from the DARPA Subterranean Challenge reveal underground spaces—as charted by robots.
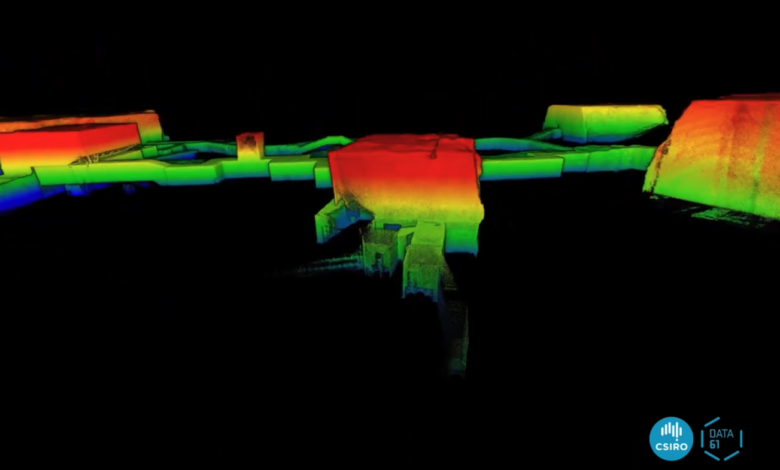
The SLAM technique stands for Simultaneous Localization and Mapping. CSIRO Data61 / YouTube /
Last week, the team that took second place in a DARPA competition called the Subterranean Challenge released two videos recorded from runs last year through the Louisville Mega Cavern. These videos, recorded as part of the competition to find, identify, and map underground spaces, offer a glimpse into the world of machine-generated mapping of three-dimensional spaces.
Each video also looks like how we might imagine a world as perceived by a robot. Rooms are mapped in dots of color, with real spaces assembled the way a computer perceives space. It is the visual equivalent of running a hand along stucco—texture rendered into form.
For the Subterranean Challenge, held in late September of 2021, an international array of teams built and then used robots to explore underground obstacle courses. These courses, set in place by DARPA beforehand (the exact parameters were concealed from participants until the start of the competition), simulated the kind of rescue and military work robots may undertake in the future.
For the final challenge, robots had to navigate environments stimulating tunnels, natural caves, and built underground urban environments. As DARPA described it, the “Challenge seeks novel approaches to rapidly map, navigate, and search underground environments during time-sensitive combat operations or disaster response scenarios.”
The second-place team in the challenge, called CSIRO Data61, is part of Australia’s national science agency; the question of how robots can better explore underground spaces is a truly global one.
What that means in practice is not just robots that can explore an underground space, but robots that can render a useful map for the humans who will follow the robots into the dark.
Robots see in lasers and light, and sometimes employ other sensors like radar, too. To make this information useful to human observers, a robot must then convert the numbers from that data back into something visual, rendering a map and a model of its immediate surroundings.
One way of converting that data to a map is Simultaneous Localization and Mapping, or SLAM. It’s a process whereby a robot creates a map, making note of where it is in relation to its surroundings.
“Our fleet uses a common sensing, mapping and navigation system across all robots, built around our Wildcat SLAM technology,” Navinda Kottege of CSIRO told IEEE spectrum. “This is what enables coordination between robots, and provides the accuracy required to locate detected objects. This had allowed us to easily integrate different robot platforms into our fleet.”
Source: Popular Science



